hinotori
システム
目指したのは人に仕え、
人を支える存在

私たちが目指すロボットは、“人の代わりとなる”のではなく、“人に仕え、人を支える”ロボットです。
hinotori™は手術に求められる術者の微細な動きを実現する手術支援ロボットとして開発されました。
それを可能にしたのは、川崎重工業の50年以上の歴史を持つロボット技術と、シスメックスの医療分野におけるネットワークおよび知見です。
メディカロイドはオープンプラットフォーム体制で、新たな機能とサービスの開発を継続的におこない、
患者様にやさしい低侵襲手術を実現します。
広い清潔野周辺の操作スペース
独自のデザインで、オペレーションアームをコンパクトにセッティングできることにより、清潔野の医師の操作スペースを広く取ることができ、医師の操作性向上につながります。

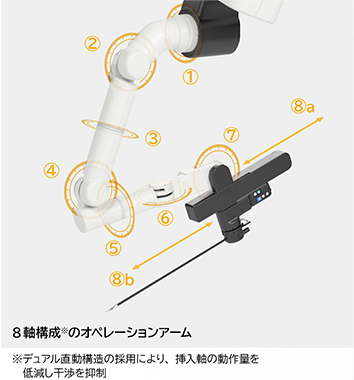
人の腕のスマートな動きを追求
アームの干渉軽減
8軸で構成されているオペレーションアームは、人の腕のようになめらかに動き、アーム同士、清潔野の医師とアームの干渉を軽減し、手術をスムーズに進めることが期待されます。
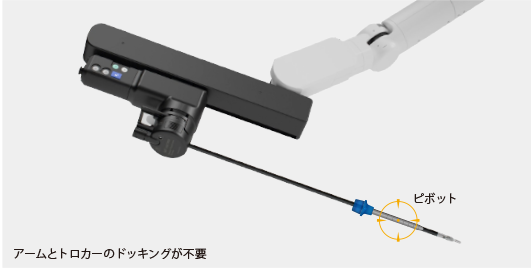
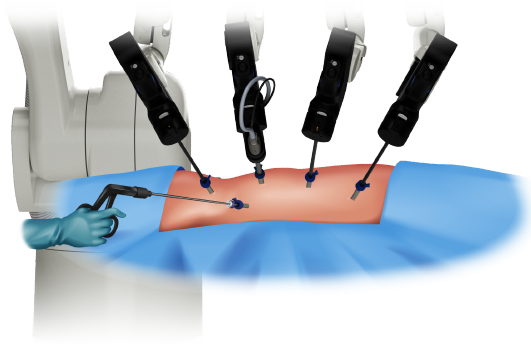
ドッキングフリーデザイン
ソフトウェアによるインストゥルメント動作支点の設定
インストゥルメントの動作支点となる“ピボット”はソフトウェアによって設定されるため、
アームとトロカ―のドッキングが不要、トロカ―周りがすっきりとします
細部まで鮮やかに映し出される
高精細画像
フルハイビジョン3Dシステムの高精細画像により、
精確な手術をアシストします。
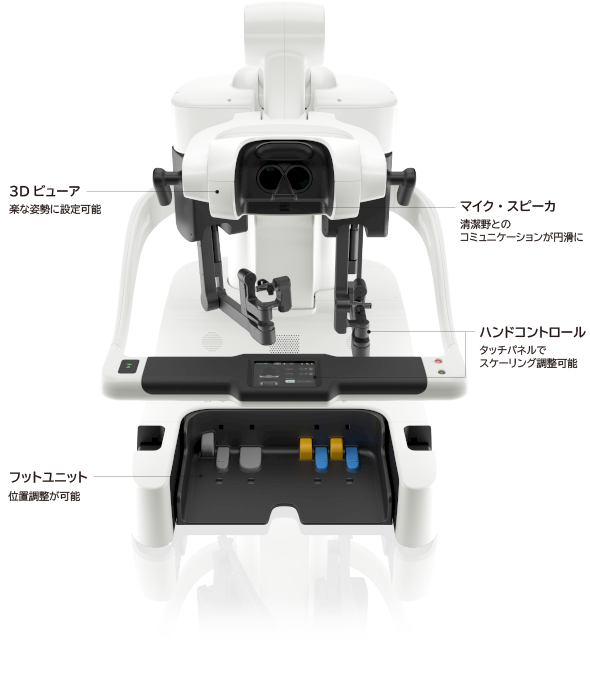
多様な操作姿勢に合わせる
エルゴノミクスデザイン
サージョンコックピットは、エルゴノミクスデザイン(人間工学に基づいた設計)により術者の負担を軽減します。
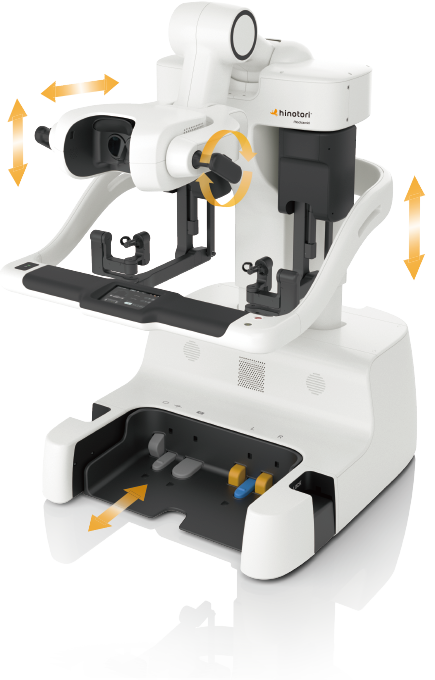

 様々な姿勢に対応
様々な姿勢に対応

